无需编写代码,仅凭文本、视频或动作捕捉数据,就能快速生成并部署机器人动作——这一曾被视为科幻场景的技术,如今在武汉光谷成为现实。5月9日,湖北人形机器人创新中心联合北京大学武汉人工智能研究院、北京虚拟动点科技,正式发布人形机器人动作大模型,并同步推出首款应用级产品“潜擎”创作平台,标志着人形机器人从实验室研发向产业化应用迈出关键一步。
该动作大模型由MotionMaster虚拟动作生成器与UniAct真机执行引擎两大核心模块构成,可接收高阶语义、视频、音频等多模态输入,并转化为多品牌、多机型通用的机器人可执行指令。据北京大学武汉人工智能研究院具身智能中心研究员何子默介绍,模型具备两大突破性能力:一是降低开发门槛,开发者无需编程基础即可完成动作设计;二是实现动作指令的跨机型通用性,且通过数据反馈机制持续优化性能。目前,模型的动作成功率、泛化能力与执行效率均达到行业领先水平,并已面向全行业开源共享。
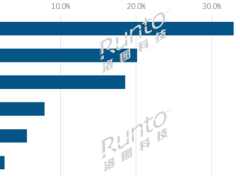
针对人形机器人领域长期存在的“输入方式单一、动作编排困难、开发者门槛高”等痛点,“潜擎”创作平台提供了系统性解决方案。潜空间具身智能(武汉)科技有限公司CEO陈睿指出,当前市场上300余款人形机器人产品中,仅少数能实现高动态运动,主要原因在于传统开发模式依赖专业编程且兼容性差。“潜擎”平台通过整合动作大模型技术,支持用户以文本描述、视频示范或动作捕捉数据直接生成机器人动作,实现“一次创作、多机通用、全场景适配”,大幅缩短开发周期并降低成本。
作为湖北具身智能产业的核心公共平台,湖北人形机器人创新中心为本次技术突破提供了全链条支撑。该中心运营负责人黄全周表示,中心不仅构建了覆盖数据采集、场地测试、真机验证到场景落地的完整研发环境,还通过联动产学研资源推动技术快速转化。例如,在模型训练阶段,中心联合高校与企业提供海量动作数据;在应用推广阶段,协助对接工业制造、物流仓储等潜在场景,加速技术从实验室到市场的落地。
发布会上,多项产业生态合作同步落地。潜空间科技与光谷东智、格蓝若、宇树科技、乐聚机器人等企业签署合作协议,围绕数据服务、模型训练、场景落地等展开协同;湖北人形机器人创新中心则与虚拟动点、飞阔科技、青瞳视觉等机构达成战略合作,共同完善产业生态链。这些合作标志着湖北在具身智能领域已形成“技术研发-场景验证-商业应用”的闭环体系,为打造全国领先的人形机器人产业高地奠定基础。