在智能化发展的浪潮中,从工业自动化迈向具身智能的跨越性进步正逐步显现。人类对于智能技术的追求已不再局限于单一技术的简单应用,而是渴望在大数据积累和技术突破的基础上,见证人形机器人从科幻设想走向现实生活。
在2025年蓝鲸“人形机器人”高端闭门研讨会上,浙江大学求是特聘教授、浙江人形机器人创新中心首席科学家熊蓉,深入探讨了具身智能机器人面临的挑战及其实地应用进展。浙江人形机器人创新中心自2023年成立以来,致力于打造一个具备智能作业能力的具身智能人形机器人,旨在赋予其广泛的移动作业能力和快速便捷的开发部署能力。
通过广泛的行业调研,该中心不断推进人形机器人本体及软硬件算法的研发。特别是在操作技能方面,依托具身智能技术,机器人已能够在多种场景下展现高精度、高可靠性的操作能力。熊蓉透露,早在去年8月,他们的人形机器人便能在双脚直立状态下完成大幅度拟人动作,执行高精度任务(如打螺丝),并在复杂环境中实现端到端的自主决策(如端茶倒水)。
2024年,浙江人形机器人创新中心推出了首代产品“领航者二号”,其手臂作业能力达到了5公斤负载和0.1毫米的精度。熊蓉强调,具身智能与人形机器人的结合,旨在打造一种多功能机器人,以取代特定任务专用的机器人。
近年来,国内外对于人形机器人的市场前景愈发乐观。花旗银行去年11月的预测报告显示,人形机器人相关产业在2030年有望达到百万市场规模,到2050年,其在机器人市场的占有率将位居第三。人形机器人的落地关键在于具身智能技术,它要求机器人通过行为表现而非内在机制来展现智能。传统的人工智能更多关注感知智能,而具身智能则强调与物理世界的交互,通过数据驱动的学习训练,实现感控一体的端到端解决方案。
熊蓉指出,人形机器人是具身智能最大的挑战者,因其高自由度、多运动模式以及复杂作业对象和场景,使得传统专家建模和机理控制方式难以适用。具身智能技术的应用,能够减少对专家知识的依赖,提升机器人的自主适应能力。同时,感控一体方案还能降低感知准确性的影响,提高行为正确性。
人形机器人的热度源于社会发展需求和技术发展的双重推动。一方面,人口老龄化问题凸显,生产制造、康养护理等领域亟需机器人补充劳动力。传统工业机器人虽已广泛应用于工业自动化,但在需要双臂手协同和全身协调能力的场景中,仍面临挑战。人形机器人与具身智能的结合,有助于打造新型通用作业机器人,降低专家编程依赖,提升自主适应能力。
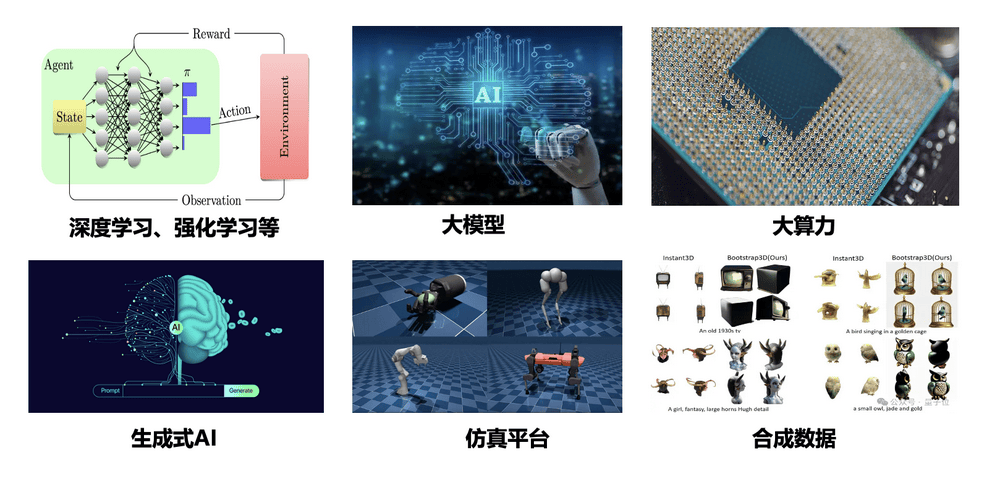
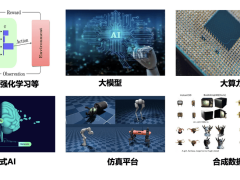
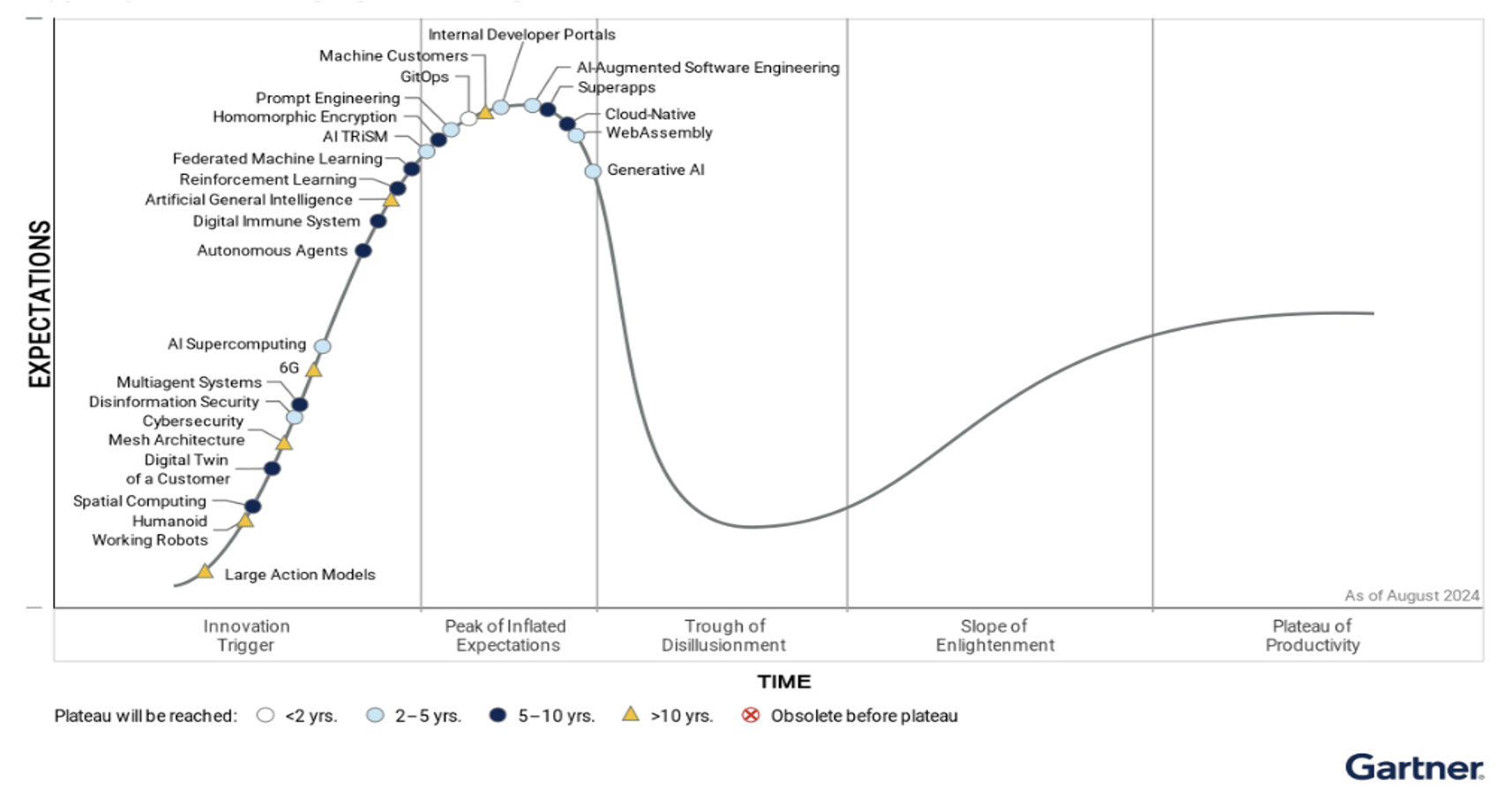
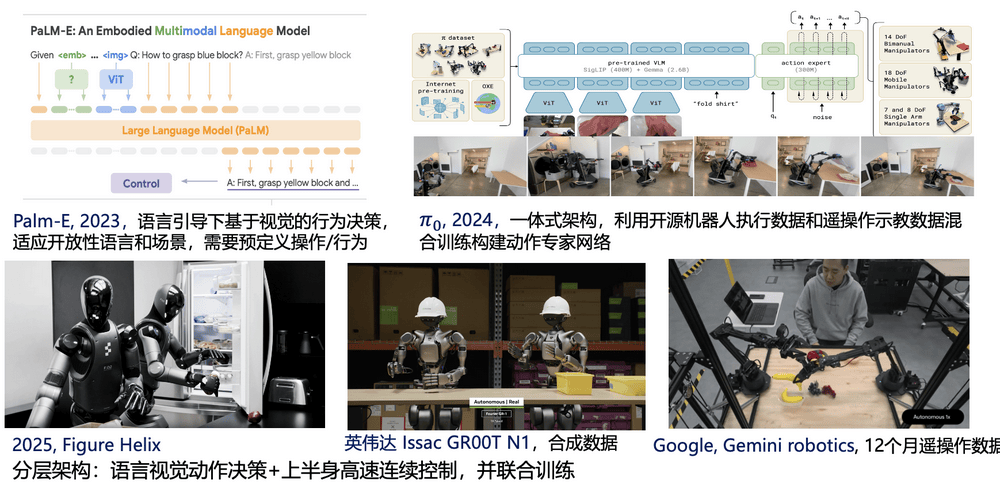
另一方面,随着大模型、生成式AI、合成数据、大算力等技术的创新,具身智能技术迎来了新的发展阶段。人形机器人拟人化鲁棒运动能力和语言-视觉-行为大模型(VLAM)的形成,为人形机器人的发展提供了有力支撑。然而,现有技术距离真正的落地应用仍面临诸多挑战,包括运动学习依赖复现/遥控、VLAM行为简单、交互行为学习训练数据匮乏、可泛化与高精度、高可靠、高效率的兼顾问题,以及传感器和执行器性能的提升需求。
浙江人形机器人创新中心在推动人形机器人及具身智能发展方面做出了诸多努力。在具身智能方面,他们在大小脑和数据采集方面取得了一系列进展,特别是在提升机器人操作技能方面。通过底层高实时、高精准的控制,实现了长序列新动作的快速学习,双臂-手-头协同的遥操作,以及可泛化高精准视觉伺服技术等。

尽管面临诸多挑战,人形机器人的发展空间依然广阔。从工厂流水线到零售场景,再到家庭服务,新的应用场景随着技术的进步不断被探索。人形机器人与具身智能的结合,正引领着智能化发展的新篇章。